重复定位精度的校准方法、装置、机器设备及存储介质与流程
本发明涉及机器控制,尤其涉及一种重复定位精度的校准方法、装置、机器设备及存储介质。
背景技术:
1、随着对机器控制的需求逐渐增加,用户对机器设备的重复定位精度的要求也越来越高,但重复定位精度会随着机器设备的长期运行,而出现下降的情况,因此,需要定时对机器设备进行重复定位精度的校准,以便保证机器设备的正常运行。
2、目前大多采用的是激光跟踪仪进行校准,虽然激光跟踪仪的精度较高,但其价格较为昂贵,且在检测过程需要技术人员实时跟踪操作,费时费力,使得对机器设备的重复定位精度进行校准的过程中存在成本高和不便捷的情况。
技术实现思路
1、本发明的主要目地在于提供一种重复定位精度的校准方法、装置、机器设备及存储介质,旨在解决常规的重复定位精度的校准成本高和便捷性低的技术问题。
2、为实现上述目地,本发明提供一种重复定位精度的校准方法,所述重复定位精度的校准方法包括以下步骤:
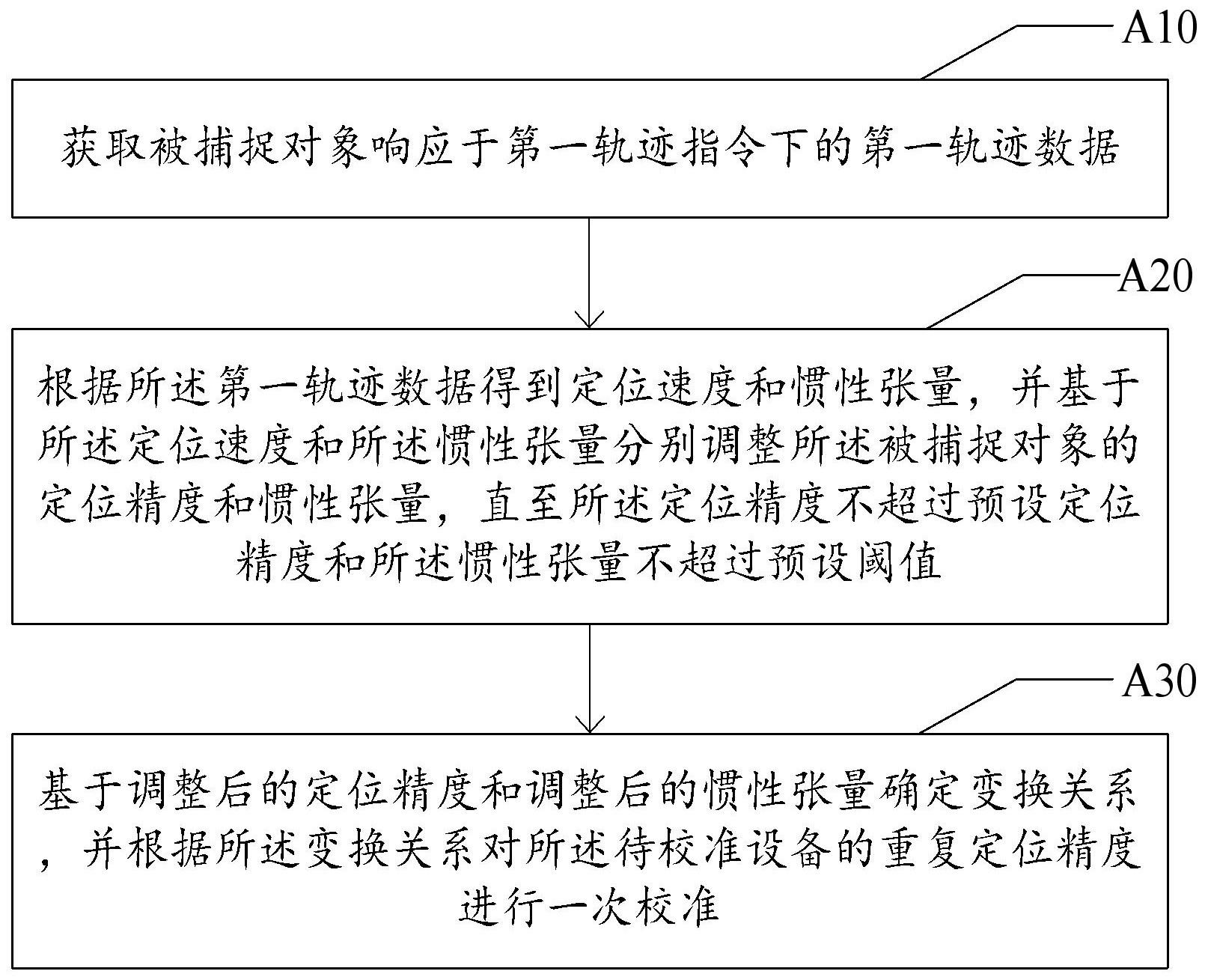
3、获取被捕捉对象响应于第一轨迹指令下的第一轨迹数据,其中,所述被捕捉对象为六轴机器人的关节轴;
4、根据所述第一轨迹数据得到定位速度和惯性张量,并基于所述定位速度和所述惯性张量分别调整所述被捕捉对象的定位精度和惯性张量,直至所述定位精度不超过预设定位精度和所述惯性张量不超过预设阈值;
5、基于调整后的定位精度和调整后的惯性张量确定变换关系,并根据所述变换关系对所述六轴机器人的重复定位精度进行一次校准。
6、可选地,所述根据所述第一轨迹数据得到定位速度和惯性张量的步骤,包括:
7、获取表征所述第一轨迹数据的四元数,根据所述四元数得到所述定位速度的轴向分量;以及,
8、对所述四元数进行求和得到求和结果,根据所述求和结果得到所述惯性张量。
9、可选地,所述基于所述定位速度和所述惯性张量分别调整所述被捕捉对象的定位精度和惯性张量,直至所述定位精度不超过预设定位精度和所述惯性张量不超过预设阈值的步骤,包括:
10、在根据所述定位速度的轴向分量判定所述被捕捉对象的所述定位精度超过所述预设定位精度和根据所述求和结果在时域上的差值判定所述被捕捉对象的所述惯性张量超过所述预设阈值的情形下,基于所述定位速度的轴向分量调整所述定位精度,直至所述定位精度不超过所述预设定位精度和基于所述求和结果确定的所述惯性张量调整所述惯性张量,直至所述惯性张量不超过所述预设阈值。
11、可选地,所述变换关系包括第一变换关系和第二变换关系,所述基于调整后的定位精度和调整后的惯性张量确定变换关系,并根据所述变换关系对所述六轴机器人的重复定位精度进行一次校准的步骤,包括:
12、根据所述调整后的定位精度和所述调整后的惯性张量确定所述第一变换关系,其中,所述第一变换关系反映世界坐标系与所述被捕捉对象的关节轴坐标系的变换关系;
13、根据所述调整后的定位精度和所述调整后的惯性张量确定所述第二变换关系,其中,所述第二变换关系反映获取所述第一轨迹数据的模块坐标系与所述关节轴坐标系的变换关系;
14、基于所述第一变换关系和所述第二变换关系对所述重复定位精度进行一次校准。
15、可选地,在所述基于调整后的定位精度和调整后的惯性张量确定变换关系,并根据所述变换关系对所述六轴机器人的重复定位精度进行一次校准的步骤之后,所述方法还包括:
16、确定一次校准后的重复定位精度所对应的第二轨迹数据;
17、依据所述第二轨迹数据调整所述第一轨迹指令对应的运动轨迹,得到第二轨迹指令。
18、可选地,所述重复定位精度的校准方法还包括:
19、获取第三变换关系,其中,所述第三变换关系反映模拟状态下的世界坐标系与所述模拟状态下的关节轴坐标系的变换关系;
20、根据所述第三变换关系对所述一次校准后的重复定位精度进行二次校准。
21、可选地,在所述根据所述第三变换关系对所述一次校准后的重复定位精度进行二次校准的步骤之后,所述方法还包括:
22、确定二次校准后的重复定位精度所对应的第三轨迹数据;
23、依据所述第三轨迹数据调整所述第一轨迹指令对应的运动轨迹,得到第三轨迹指令。
24、本发明还提供一种重复定位精度的校准装置,所述重复定位精度的校准装置包括:
25、获取模块,用于获取被捕捉对象响应于第一轨迹指令下的第一轨迹数据,其中,所述被捕捉对象为六轴机器人的关节轴;
26、调整模块,用于根据所述第一轨迹数据得到定位速度和惯性张量,并基于所述定位速度和所述惯性张量分别调整所述被捕捉对象的定位精度和惯性张量,直至所述定位精度不超过预设定位精度和所述惯性张量不超过预设阈值;
27、校准模块,用于基于调整后的定位精度和调整后的惯性张量确定变换关系,并根据所述变换关系对所述六轴机器人的重复定位精度进行一次校准。
28、此外,为实现上述目的,本发明还提供一种机器设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机处理程序,所述处理器执行所述计算机处理程序时实现上述重复定位精度的校准方法的步骤。
29、此外,为实现上述目的,本发明还提供一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,计算机程序被处理器执行时实现上述重复定位精度的校准方法的步骤。
30、本发明通过获取被捕捉对象响应于第一轨迹指令下的第一轨迹数据,其中,被捕捉对象为六轴机器人的关节轴,根据第一轨迹数据得到定位速度和惯性张量,并基于定位速度和惯性张量分别调整被捕捉对象的定位精度和惯性张量,直至定位精度不超过预设定位精度和惯性张量不超过预设阈值,基于调整后的定位精度和调整后的惯性张量确定变换关系,并根据变换关系对六轴机器人的重复定位精度进行一次校准,实现在无需激光跟踪仪的情况下,只需要采集六轴机器人响应于一个轨迹指令下的轨迹数据就能完成对重复定位精度的校准,同时,在校准过程中对定位精度和惯性张量进行相应的调整使其满足相应的要求,以此避免因定位精度不高和惯性张量过大导致的基于定位精度和惯性张量生成的变换关系不能够实现高精度校准重复定位精度的问题,操作成本低且快捷。
技术特征:
1.一种重复定位精度的校准方法,其特征在于,所述重复定位精度的校准方法包括以下步骤:
2.如权利要求1所述的重复定位精度的校准方法,其特征在于,所述根据所述第一轨迹数据得到定位速度和惯性张量的步骤,包括:
3.如权利要求2所述的重复定位精度的校准方法,其特征在于,所述基于所述定位速度和所述惯性张量分别调整所述被捕捉对象的定位精度和惯性张量,直至所述定位精度不超过预设定位精度和所述惯性张量不超过预设阈值的步骤,包括:
4.如权利要求3所述的重复定位精度的校准方法,其特征在于,所述变换关系包括第一变换关系和第二变换关系,所述基于调整后的定位精度和调整后的惯性张量确定变换关系,并根据所述变换关系对所述六轴机器人的重复定位精度进行一次校准的步骤,包括:
5.如权利要求4所述的重复定位精度的校准方法,其特征在于,在所述基于调整后的定位精度和调整后的惯性张量确定变换关系,并根据所述变换关系对所述六轴机器人的重复定位精度进行一次校准的步骤之后,所述方法还包括:
6.如权利要求5所述的重复定位精度的校准方法,其特征在于,所述重复定位精度的校准方法还包括:
7.如权利要求6所述的重复定位精度的校准方法,其特征在于,在所述根据所述第三变换关系对所述一次校准后的重复定位精度进行二次校准的步骤之后,所述方法还包括:
8.一种重复定位精度的校准装置,其特征在于,所述重复定位精度的校准装置包括:
9.一种机器设备,其特征在于,所述机器设备包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机处理程序,所述处理器执行所述计算机处理程序时实现权利要求1至7中任一项所述的重复定位精度的校准方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的重复定位精度的校准方法的步骤。
技术总结
本发明公开了一种重复定位精度的校准方法、装置、机器设备及存储介质,涉及机器控制技术领域,通过获取被捕捉对象响应于第一轨迹指令下的第一轨迹数据,其中,被捕捉对象为六轴机器人的关节轴,根据第一轨迹数据得到定位速度和惯性张量,并基于定位速度和惯性张量分别调整被捕捉对象的定位精度和惯性张量,直至定位精度不超过预设定位精度和惯性张量不超过预设阈值,基于调整后的定位精度和调整后的惯性张量确定变换关系,并根据变换关系对六轴机器人的重复定位精度进行一次校准,实现在无需激光跟踪仪的情况下,只需要采集六轴机器人响应于一个轨迹指令下的轨迹数据就能完成对重复定位精度的校准,操作成本低且快捷。
技术研发人员:蒋亦峰,王照富,丁亚,冯浩然,陈森
受保护的技术使用者:佛山隆深机器人有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!