



















MoveIt!入门教程-简介
说明
- MOVEit!是目前针对移动操作最先进的软件。
- 它结合了运动规划,操纵,三维感知,运动学,控制和导航的最新进展
- 它提供了一个易于使用的平台,开发先进的机器人应用程序,评估新的机器人设计和建筑集成的机器人产品
- 它广泛应用于工业,商业,研发和其他领域。
- MOVEit!是最广泛使用的开源软件的操作,并已被用于超过65个机器人
概念
- 系统结构

The move_group node(move_group节点)
如上图,其中最重要的就是move_group节点,充当整合器:整合多个独立的组件,并提供ROS风格的Action和serviceUser Interface(用户接口,三种接口可供调用)
- C++, 利用move_group_interface包可以方便使用move_group。
- Python,利用moveit_commander包
- GUI(界面),利用Motion Planning 的 Rviz插件。
配置,move_group是ROS节点,它在ROS param server获取三种信息,
- URDF ,从ROS param server中查找robot_description,获取URDF,它是机器人的描述文件。
- SRDF ,从ROS param server中查找robot_description_semantic,获取SRDF.它一般通过MoveIt! Setup Assistant生成。
- MoveIt! configuration ,从ROS param server中获取更多信息,如joint limits, kinematics, motion planning, perception and other information。
- 配置文件由MoveIt! Setup Assistant生成,存放在MoveIt! config目录中。
Robot Interface(机器人接口)
- move_group通过ROS topics和actions与机器人通讯,获取机器人的状态(位置,节点等),获取点云或其他传感器数据再传递给机器人的控制器。
Joint State Information(节点状态信息)
- move_group监听 /joint_states 主题确定状态信息。例如:确定每个节点的位置。
- Move_group能够监听在这主题的多个发布器信息,即使是发布部分的信息(例如:独立的发布器可能是用于机械臂或移动机器人)。
- ove_group不会建立自己的节点状态发布器。这就需要在每个机器人单独来建立。
Transform Information(变换信息)
- Move_group通过ROS TF库来监视变换信息。这允许节点获取全局的姿态信息。
- 例如:navigation包发布机器人的map frame和base frame到TF,move_group可以使用TF找出这个变换信息,在内部使用。
- 注意:Move_group只是监听TF,你需要启动robot_state_publisher才能发布TF。
Controller Interface (控制器接口)
- 通过ROS的action接口,FollowJointTrajectoryAction接口来使用控制器。
- 一个机器人的服务器服务于这个action-这个服务器不是有move_group提供。
- move_group只会实例化客户端与机器人的控制器action服务器通讯。
Planning Scene(规划场景)
- move_group使用规划场景监视器来维护规划场景。
- 场景是世界的和机器人的状态的表现。
- 机器人状态包含机器人刚性连接到机器人的所有物体。
- 关于维护和更新规划场景的体系结构的详细信息在下面的规划场景部分中描述。
Extensible Capabilities(可扩展能力)
- move_group的结构被设计成容易扩展,独立的能力如抓放,运动学,运动规划。
- 扩展自公共类,但实际作为独立的插件运行。
- 插件可经由一系列的ROS yaml parameters 和ROS pluginlib库配置。
运动规划
The Motion Planning Plugin(运动规划插件)
- 运动规划器通过插件接口方式与MoveIt一起工作。这使得MoveIt更容易扩展,能同时与不同的库不同的运动规划器通讯。
- 运动规划器接口通过ROS Action或service方式提供。
- 针对 move_group的默认规划器通过MoveIt! Setup Assistant来配置使用OMPL或OMPL的MoveIt!接口
The Motion Plan Request(运动规划请求)
- 运动计划请求清楚地指定你想要的运动计划做什么。
- 通常情况下,你会要求运动规划器将一只手臂移动到一个不同的位置(在关节空间)或末端执行器到一个新的姿势。
- 默认情况下会进行碰撞检查(包括自碰撞)
- 您可以将一个对象附加到末端执行器(或机器人的任何一部分),例如,如果机器人拿起一个对象。这使得运动规划器考虑到对象的运动而进行路径规划。
- 你可以指定运动规划器检查的约束 - 内置的约束由kinematic constraints提供:
- Position constraints(位置约束) - 限制连接的位置在某个空间区域
- Orientation constraints(方向约束) - 限制连接的方向在指定的roll, pitch和yaw范围
- Visibility constraints(可视化约束) - 限制连接的点在特定传感器的一个可视化的锥形范围
- Joint constraints(节点约束) - 限制节点位于两个值之间
- User-specified constraints(自定义约束) - 利用自定义回调函数来指定自定义的约束。
The Motion Plan Result(运动规划结果)
- move_group节点会根据的运动规划请求,产生一个期望的轨迹。这个轨迹会移动机械臂(一组节点)到期待的位置。
- move_group的结果是轨迹不仅仅是路径 - move_group会以希望最大的速度和加速度(需指定)来生成用于轨迹。
- 此轨迹需要遵循速度和加速度的限制
The Motion Planning Pipeline(运动规划管道)
- Motion planners and Plan Request Adapters(运动规划器和规划请求适配器)
- 图示:
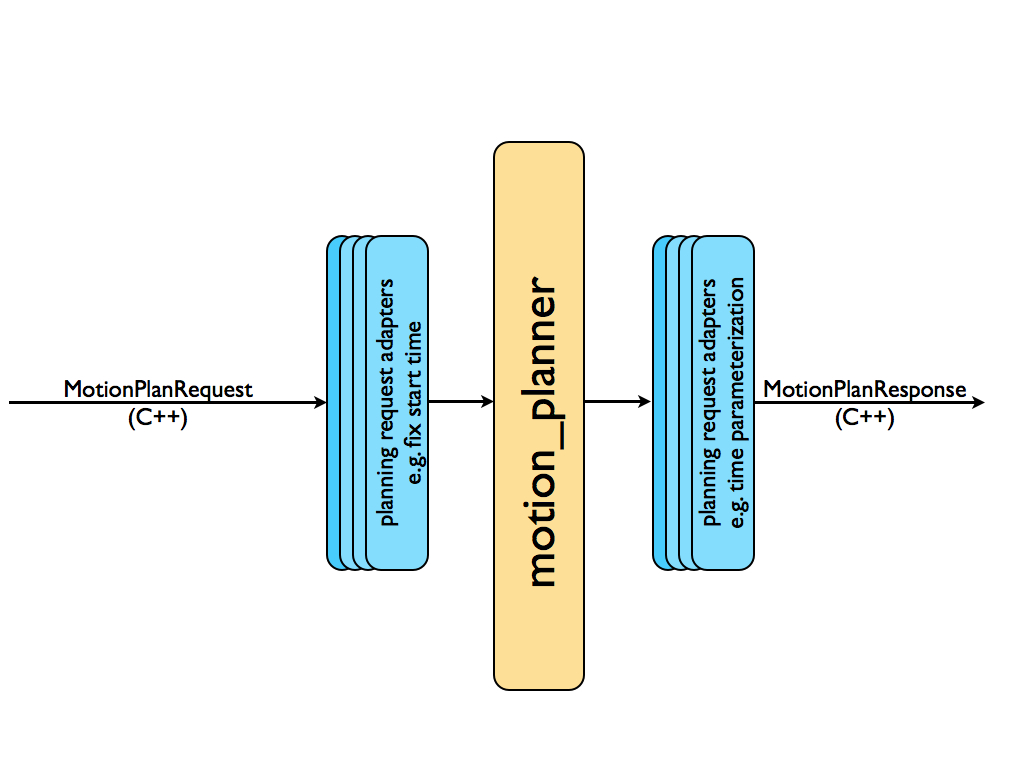
- 完整的运动规划管道链整合规划规划器与多个叫规划请求适配器的组件。
- 规划请求适配器允许规划请求预处理和规划反馈后处理。
- 预处理在某些情况有用,例如:机器人的起始状态稍微超出关节限制之外的情况。
- 后处理需要处理几个操作,例如:转换生成的路径为带时间参数的轨迹。
- MoveIt提供一系列默认的运动规划器适配器,每个都执行一个指定的功能。
- 常用运动规划适配器:
- FixStartStateBounds,这个适配器修复在URDF文件里面描述的关节限制的开始状态。用于仿真器中,当机器人配置不正确的时候。当有一个或多个关节稍微超出限制,机器人可能会结束。在这种情况下,运动规划就不能正常执行,因为它认为已经超出了关节限制。FixStartStateBounds请求适配器会修复开始状态到设置的关节限制内。但这不是每一次都是合适的解决方案。例如有多少关节超出限制。适配器参数则指定有多少关节超出限制才启用修复。
- FixWorkspaceBounds,这个适配器会为规划指定一个默认的工作空间,一个立方体的大小为10米×10米×10米。如果规划请求的规划器没有填充这些区域,将会指定工作空间。
- FixStartStateCollision,The fix start state collision adapter will attempt to sample a new collision-free configuration near a specified configuration (in collision) by perturbing the joint values by a small amount. The amount that it will perturb the values by is specified by a “jiggle_factor” parameter that controls the perturbation as a percentage of the total range of motion for the joint. The other parameter for this adapter specifies how many random perturbations the adapter will sample before giving up.
- FixStartStatePathConstraints,This adapter is applied when the start state for a motion plan does not obey the specified path constraints. It will attempt to plan a path between the current configuration of the robot to a new location where the path constraint is obeyed. The new location will serve as the start state for planning.
- AddTimeParameterization,The motion planners will typically generate “kinematic paths”, i.e., paths that do not obey any velocity or acceleration constraints and are not time parameterized. This adapter will “time parameterize” the motion plans by applying velocity and acceleration constraints.
OMPL
OMPL (Open Motion Planning Library) 是一个开源的运动规划库,主要是执行随机规划器。MoveIt直接整合OMPL,使用其库里的运动规划器作为主要/默认的一套规划器。在OMPL规划器是抽象的,例如:OMPL没有机器人的概念。MoveIt!配置OMPL,提供一个后端处理,用于解决机器人的问题。
规划场景
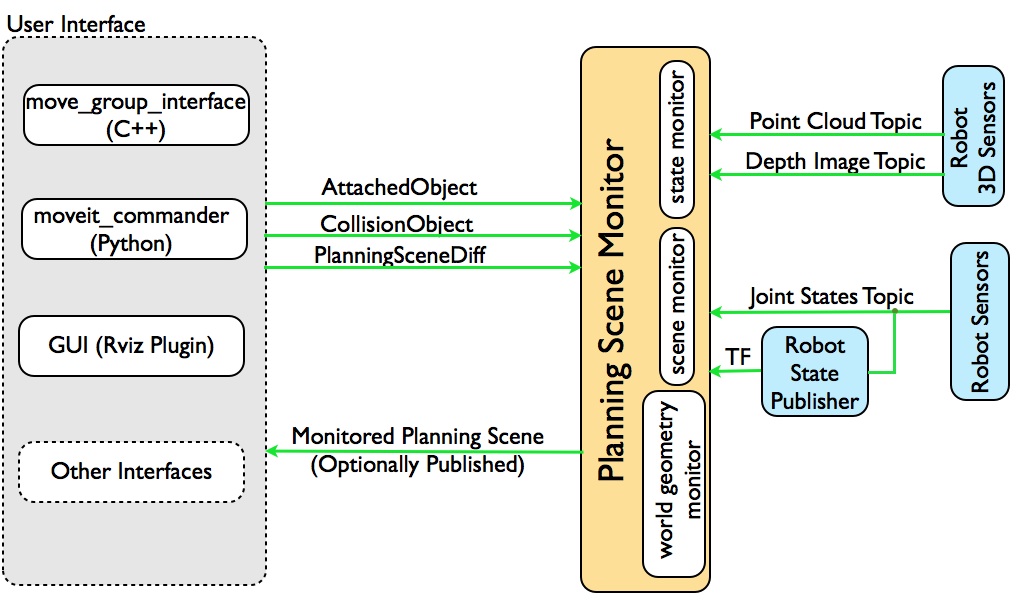
规划场景,用于显示机器人的世界,同时保存机器人自己的状态。它由Move_group节点内的规划场景监视器来维护。规划场景监视器监听:
- State Information(状态的信息): joint_states 主题
- Sensor Information(传感器的信息): using the world geometry monitor described below
- World geometry information(世界的几何图形信息): from user input on the planning_scene topic (as a planning scene diff).
World Geometry Monitor(世界几何图形监视器),它通过来自机器人的传感器信息和来自用户的输入建立世界几何图形。它使用occupancy map monitor(occupancy地图监视器)建立围绕机器人的3D感知环境和通过planning_scene主题中附带的参数来增加对象的信息。
3D Perception(3D感知)
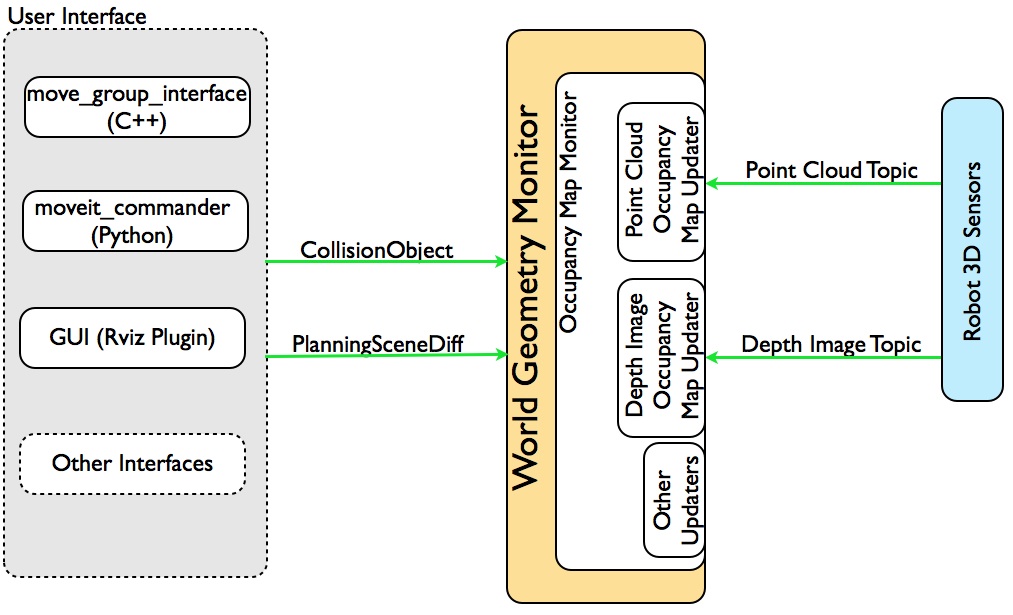
在MoveIt,3D感知是由occupancy map monitor处理,它使用插件结构处理不同的传感器输入。MoveIt有两个内置支持可以处理两种输入:
- Point clouds: handled by the point cloud occupancy map updater plugin
- Depth images: handled by the depth image occupancy map updater plugin
你可为occupancy map monitor编写自己的插件。
Octomap, Occupancy map monitor使用Octomap维持Occupancy map的环境。The Octomap can actually encode probabilistic information about individual cells although this information is not currently used in MoveIt!. The Octomap can directly be passed into FCL, the collision checking library that MoveIt! uses.
Depth Image Occupancy Map Updater,深度图像栅格地图的更新器包括它自己的过滤器,例如:它可以从深度图消除机器人的可见部分。它使用目前有关的机器人的信息(机器人状态)进行此操作。
Kinematics(运动学)
The Kinematics Plugin(运动学插件),MoveIt!使用插件结构,尤其是允许用户编写自己的逆运动学算法。Forward kinematics(正向运动学) and finding jacobians(查找雅可比矩阵) 被整合到自己的RobotState类。默认逆运动学插件配置使用KDL numerical jacobian-based solver.由MoveIt! Setup Assistant自动配置。
IKFast Plugin(IKFast插件),通常,用户可以选择执行自己的运动学求解器,例如PR2的有自己的运动学求解器。要实现这样的求解的一种流行的方法是使用ikfast包产生的需要与您的特定工作的机器人的C++代码。
Collision Checking(冲突检测),在规划场景中,冲突检测通过CollisionWorld对象来配置,由FCL包(主要的CC库)来执行。
Collision Objects(冲突对象),MoveIt支持不同类型对象的冲突检测。
- Meshes(网格)
- Primitive Shapes(基本形状) - 例如: boxes(箱), cylinders(圆柱), cones(圆锥), spheres(球) and planes(平面)
- Octomap - Octomap 对象能直接用于冲突检测
Allowed Collision Matrix (ACM)(免检冲突矩阵),在运动规划里,冲突检测会耗费甚至达到90%的计算资源。ACM编码需要检测的对象间的对应关系(机器人的或世界的)。如果在ACM关联两对象的值为1,那就不需要检测,这情况就比如两个对象相隔很远,永远不会发生碰撞。
Trajectory Processing(轨迹处理)
- Time parameterization(时间参数化),运动规划器一般只会生成路径,这个路径不带时间信息。MoveIt包含轨迹处理程序。它对结合路径和时间参数化的关节限制的速度和加速度来生成轨迹。这些限制是在joint_limits.yaml中为每个机器人指定的。
许可证
- MOVEit!是BSD许可下发布的开源和V3。
- 在MOVEit每个文件!源代码应该包含一个许可证的副本。
致谢
MOVEit!最初在Willow Garage由Sachin Chitta,Ioan Sucan,Gil E. Jones,Acorn Pooley,Suat Gedikli,Dave Hershberger开发,感谢Willow Garage对MOVEit项目的支持!。也要感谢SRI国际在2013十月至2015六月MOVEit项目的支持!。
我们感谢以下的人对MoveIt的贡献!和相关的软件包,MOVEit!使用(或在某一点使用):
- Lydia Kavraki,Mark Moll,和相关的kavraki实验室成员(莱斯大学)开发了OMPL - 自动随机规划算法软件包。
- Dinesh Manocha 和 来自UNC Chapel Hill的 Jia Pan 开发了 FCL - 冲突检测算法的软件包
- 马克西姆利哈乔夫(CMU)、Ben Cohen(Penn)和Mike Phillips(CMU)开发SBPL-基于搜索的规划库
- Armin Hornung,Kai Wurm,Maren Bennewitz,Cyril Stachniss,开发octomap-针对3D occupancy mapping
- Mrinal Kalakrishnan,Peter Pastor和Stefan Schaal在南加大开发STOMP-the distance field components 和CHOMP算法用于机械臂的导航
- Dave Coleman从科罗拉多大学开发MOVEit的配置助理和添加文件到MOVEit!网站.
- Michael Ferguson开发简单的控制器管理插件
- Sachin Chitta和Praveen Singh创建当前网站
MoveIt! 由臂导航和Grasping管道组件演变而来,感谢所有参与这些软件包的开发和研究工作者,特别是Edward Gil Jones, Matei Ciocarlie, Kaijen Hsiao, Adam Leeper, 和Ken Anderson.
同样感谢曾经在Willow Garage工作的实习生!臂导航和相关组件的ROS和PR2的社区成员,为MOVEit!提供反馈和提供贡献。
同样感谢ROS工业联盟的贡献者(由the Southwest Research Institute领导)为MoveIt和臂导航应用与工业环境提供的基础设施。感谢Fraunhofer IPA的贡献者在欧洲为MoveIt带来的支持。