一种自动化磁链标定方法与流程
1.本发明涉及永磁同步电机磁链标定技术领域。
背景技术:
2.永磁同步电机(pmsm)具有重量轻、体积小、效率高、具有弱磁扩速潜力等诸多 优点,被广泛应用于伺服装置、电动汽车等场合。为了充分利用永磁体材料和空间,在 电机过载时电机往往设计在饱和运行点,而电机磁饱、dq轴互感、温度变化等非线性因 素会严重影响控制系统性能。因此,提前标定出不同dq电流下的电机定子磁链矩阵, 并将其应用在电机控制中是非常必要的。另外对标定过程中如何排除永磁体温度变化等 非线性因素的影响、提高标定的准确性便捷性的研究也是非常必要的。
3.已发表的定子磁链矩阵标定方法主要基于定子电压方程获取电机dq轴磁链:
[0004][0005][0006]
其中ψq=l
qiq
,ψd=ldid+ψf,ψd为d轴磁链,ψq为q轴磁链,ψf为永磁体磁链, r,是定子电阻,ld,是d轴电感,lq,是q轴电感,ωe,是电气角频率。
[0007]
针对磁链矩阵的标定,学者们研究的方向有很多:
[0008]
授权公告号为cn109713973b的中国发明专利《永磁同步电机定子磁链矩阵提取方 法及应用》中使用对拖方式标定电机磁链矩阵,核心思路为利用冷态永磁体磁链与当前 热态永磁体磁链差值推算电机温度,再根据电机温度对磁链标定结果进行补偿,该方法 在标定过程中未能对温度进行控制,磁链矩阵中的每个点并非在相同永磁体温度下标定, 存在误差。
[0009]
授权公告号为cn103018577b的中国发明专利《一种测量永磁同步电机参数的方法》 中采用高频电压注入的方式辨识电机参数,但其未考虑电机运行时的磁饱和、dq互感以 及永磁体温度变化等非线性因素影响。
[0010]
授权公告号为cn103560736b的中国发明专利《一种永磁同步电机的静止型离线参 数辨识方法》中通过更改电机绕组的连接方式,获取电机转子位置在90
°
和0
°
时的不 同绕组连接状态下的电压方程,来求取出电机参数,其同样未考虑温度对电机参数的影 响,同时更改电机绕组连接方式也增加了测试的复杂性。
[0011]
因此,如何在标定过程中排除永磁体温度变化等非线性因素的影响、提高标定的准 确性便捷性,从而可以提前标定出不同dq电流下的电机定子磁链矩阵,并将其应用在 电机控制中即成为了本领域技术人员亟待解决的技术问题。
技术实现要素:
[0012]
本发明针对以上问题,提出了一种自动化磁链标定装置与方法,在磁链标定过程
中, 对永磁体温度进行滞环控制,可以保证磁链矩阵中每个点近乎是在同一温度下测量得到 的,同时可以方便地调整电机所要运行的温度,测试不同温度下的磁链矩阵。
[0013]
本发明的技术方案为:按以下步骤进行:
[0014]
s1、建立对拖平台,将被测电机拖动到某固定转速,转速范围可以选定为0.1vn~vn, 其中vn为电机额定转速,被测电机采用电流矢量闭环控制,先手动标定出反电势、电 阻与电机温度的数值关系,如图1,具体过程如下:
[0015]
s1.1、对被测电机加载,使电机温度上升;
[0016]
s1.2、每隔一定的温度点,使电机空载(id=0,iq=0),此时电压方程为 uq=ωeψd=ωeψf,其中ωe为电气角频率、ψf为永磁体磁链、ψd为d轴磁链、uq为反馈 电压,反馈电压uq值即为电机反电势eq值,记录电机反电势eq(uq值);
[0017]
s1.3、按步骤s1.2中相同的温度点,使用伏安法测量电机定子电阻值,此处不再赘 述;最终得到反电势、电阻与电机温度的数值关系。
[0018]
步骤s1.1对被测电机加载,使电机温度逐渐上升至100℃;步骤s1.2中相邻温度点 的间隔为为10℃。
[0019]
s2、由步骤s1得到了反电势、电阻与电机温度的数值关系,即根据eq值就能确定 电机的温度,构造某温度点对应反电势eq的小范围滞环区间(e
ql
,e
qh
);区间可以选择 为当前反电势eq的上下10%以内,即0.9eq《e
ql
《eq,eq《e
qh
《1.1eq;
[0020]
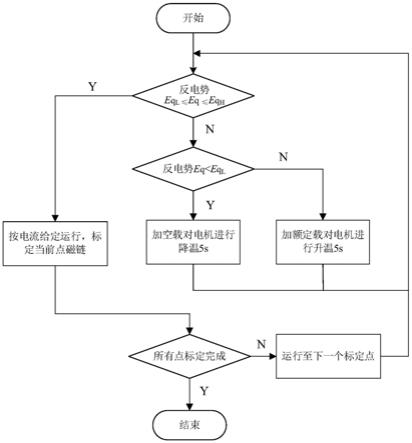
s3、此时即可使用本文所提的自动化磁链标定方法,在磁链标定时构建温度的滞环 控制,其过程为:
[0021]
当反电势eq《e
ql
时,对电机空载一定时间,使电机温度下降;
[0022]
当反电势eq》e
qh
时,使电机加载一定时间,使电机温度上升;
[0023]
当e
ql
≤eq≤e
qh
时,对电机进行dq电流给定,记录下反馈电压ud、uq值,根据电 压方程求取当前点的dq轴磁链;
[0024]
s4、改变电流给定的值,重复步骤s3即可标定其他电流点的dq轴磁链,直至所有 电流点标定完成。
[0025]
在以上步骤基础上,也可选取其他温度点对应的eq值,构建温度滞环控制,即通过 改变步骤s2中选取的温度点,并重新进行步骤s3、s4,以获取不同温度下的磁链矩阵。
[0026]
温度滞环控制并不仅仅只能通过反电势eq的数值范围来实施。其它拥有类似温度获 取功能的装置、方法,例如温度传感器等,按上述步骤实施均有可能获得本发明的有益 效果,因此本发明的保护范围不局限于使用上述步骤展示的标定方式。
[0027]
本发明是一种引入温度滞环控制的自动化磁链标定方法,具有以下有益效果:
[0028]
一、本案可以使电机在每个磁链标定点处于相同温度,剔除了温度对标定准确性的 干扰;并可以标定不同温度下的电机磁链矩阵。
[0029]
二、本案中的温度滞环控制基于电机反电势信号构建的,无需温度传感器等设备, 成本低。当然,亦可由温度传感器信号构建温度滞环控制,可达到一样的有益效果。
[0030]
三、本案通过控制器软件或驱动器软件进行滞环控制,实现磁链标定的自动化。
[0031]
最终,即实现了提前标定出不同dq电流下的电机定子磁链矩阵,并将其应用在电机 控制中的目的,并且,标定过程中可有效排除永磁体温度变化等非线性因素的影响、提 高标定的准确性便捷性。
附图说明
[0032]
图1是反电势、电阻与电机温度的数值关系图,
[0033]
图2是标定多拖平台示意图,
[0034]
图3是标定步骤流程图,
[0035]
图4是被测电机q轴磁链图,
[0036]
图5是被测电机d轴磁链图。
具体实施方式
[0037]
为能清楚说明本专利的技术特点,下面通过具体实施方式,并结合其附图,对本专 利进行详细阐述。
[0038]
搭建磁链矩阵自动化标定平台,如图2所示。本实施例步骤如下:
[0039]
s1、建立对拖平台,包括原动机、被测电机以及控制器,分别通过两个驱动器对原 动机以及被测电机进行驱动,并且原动机的输出轴和被测电机的输出轴通过联轴器保持 连接,所述控制器通过总线网络连接用于驱动被测电机的驱动器;
[0040]
使用对拖平台将被测电机拖动至转速ω=500rpm,被测电机为5对极,对应的电气 角频率为ωe=261.7rad/s;手动测定反电势、电阻与电机温度的数值关系,如图1所示;
[0041]
s2、选定电机在80℃对应的反电势值为e
q0
=11.6v,此时电机定子电阻值为r0=2.2ω。 此时选取滞环控制的上下限值分别为e
ql
=0.98e
q0
=11.37v,e
qh
=1.02e
q0
=11.83v;
[0042]
s3、之后按照图3所示流程,进行温度滞环控制。控制器通过总线网络向驱动器发 送电流给定指令,并接收来自驱动器的反馈数据:
[0043]
当控制器读到反电势eq《e
ql
时,对电机加空载5s,使温度下降;
[0044]
当控制器读到反电势eq》e
qh
时,给电机加额定载5s,使温度上升;
[0045]
当反电势e
ql
≤eq≤e
qh
时,对电机进行dq电流给定,例如需要标定i
d0
=-0.2i
qn
, i
q0
=0.4i
qn
电流点的磁链(i
qn
=2.7a,为电机额定电流),控制器给电机施加此电流给定;
[0046]
控制器记录下此时的反馈电压u
d0
=-3v、u
q0
=14.5v,将u
d0
、u
q0
值代入前述电压 方程,得到:
[0047]ud0
=r0i
d0-ψ
q0
ωe[0048]uq0
=r
siq0
+ψ
d0
ωe[0049]
即可得到i
d0
=-0.2i
qn
,i
q0
=0.4i
qn
点的磁链:
[0050][0051][0052]
然后控制器软件将计算得到的结果保存至控制器的存储器中。
[0053]
s4、重复步骤s3即可标定出其他电流点的磁链,这样就将80℃下被测电机的dq轴 磁链矩阵标定出来了,如图5所示。
[0054]
以上步骤s3、s4由控制器软件自动操作,不需要人工干预。当然,该流程也可直 接由被测电机驱动器实现。
[0055]
同理也可选定30℃、60℃等其他温度下的eq值构建温度滞环控制。按照上述步骤 即可标定其他温度下的电机磁链矩阵。
[0056]
本发明具体实施途径很多,以上所述仅是本发明的优选实施方式,应当指出,对于 本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进, 这些改进也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1